LDS Documentation
This page has pictures of the Gen One and Gen Two Neato LIDAR
Logic Requirements: 5V
Motor draw at 3v3 ~0.5 A
Both TX and RX need to be connected for data to come from the LDS
Top View:

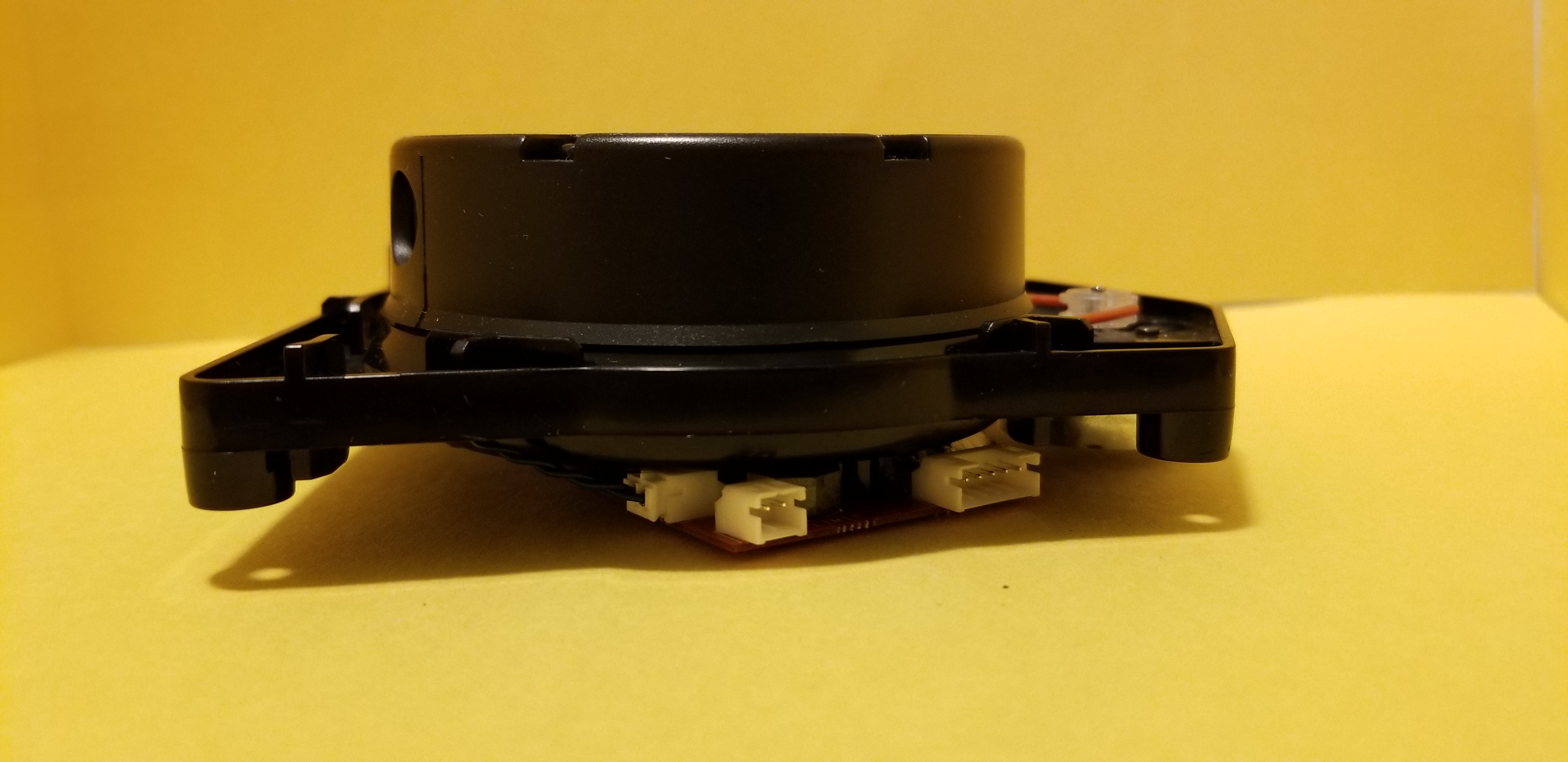
Side View 1:

Side View 2:

Side View 3:

Side View 4:

Bottom View:

Closeup of connectors:

Closeup of board (still attached):

Closeup of the bottom (board removed):

Board flipped over:

Closeup of board:

There are a few revisions of PCBs. Rev 5 and 7 seem to be what is found in the wild, e.g. shown in a forum thread here.
Rev 3 PCB (Red):
Top View:

Side View 1:

Side View 2:
Side View 3:

Side View 4:

Bottom View:

Bottom View (closeup):

Bottom View (closeup without board):

Board Flipped Over:

Board Flipped Over (closeup):

Rev 5 PCB (Black rectangular):
TODO