Because you deserve to relax all the way home
The project is implemented in MATLAB. The motion planner software, called Simulator AVD, is developed as the result of the method. Simulator ADV offers an array of amazing features in which users can experience. Below is a few key features that is available in Simulator ADV.
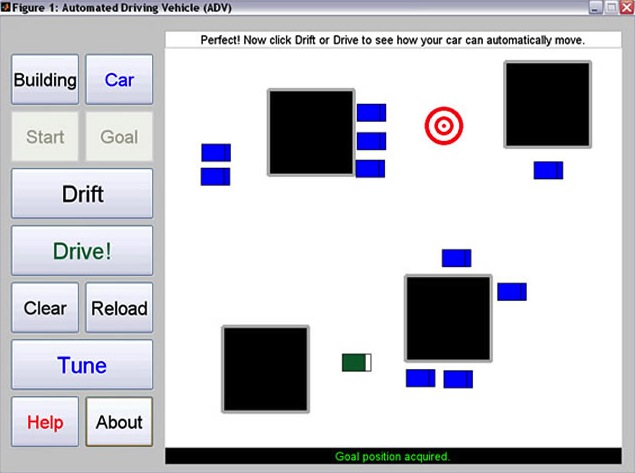
You will get to decide where the obstacles (buildings and parked car) as well as the intial and starting position should be. After each simulation, you can decide to keep the obstacle for the next one by simple choosing reload option.
There's two modes of motion you can choose from: driving or drifting. When driving is selected, you robot will move like a car. You will experience the real motion of car driving. When drifting is selected, you robot will move like a walking robot.
The machanism of RRTs can be clearly explained in step-by-step simulation. The animation shows how the RRT trees in constructed and grow. User can gain a true understanding on how RRT works by looking at the simulation.
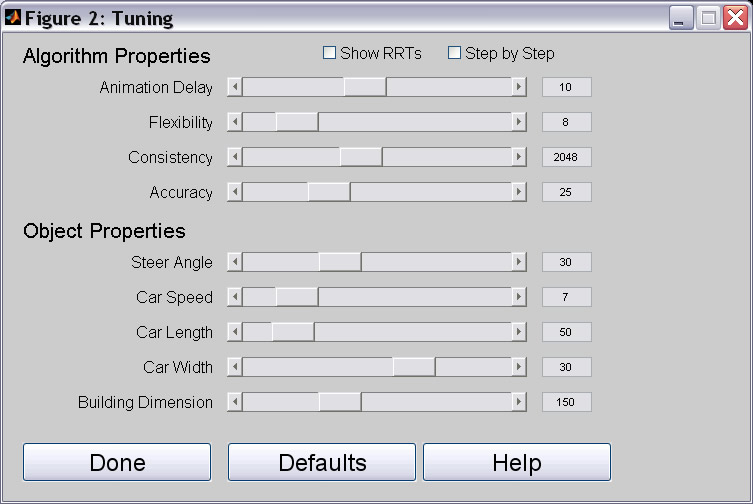
You get to tune how fast should the car-robot go, how sharp should it turn. You can also determine the shape of the car, should it a long van, or big SUV, or a small compact. It's all up to you!
You can find the project webpage here