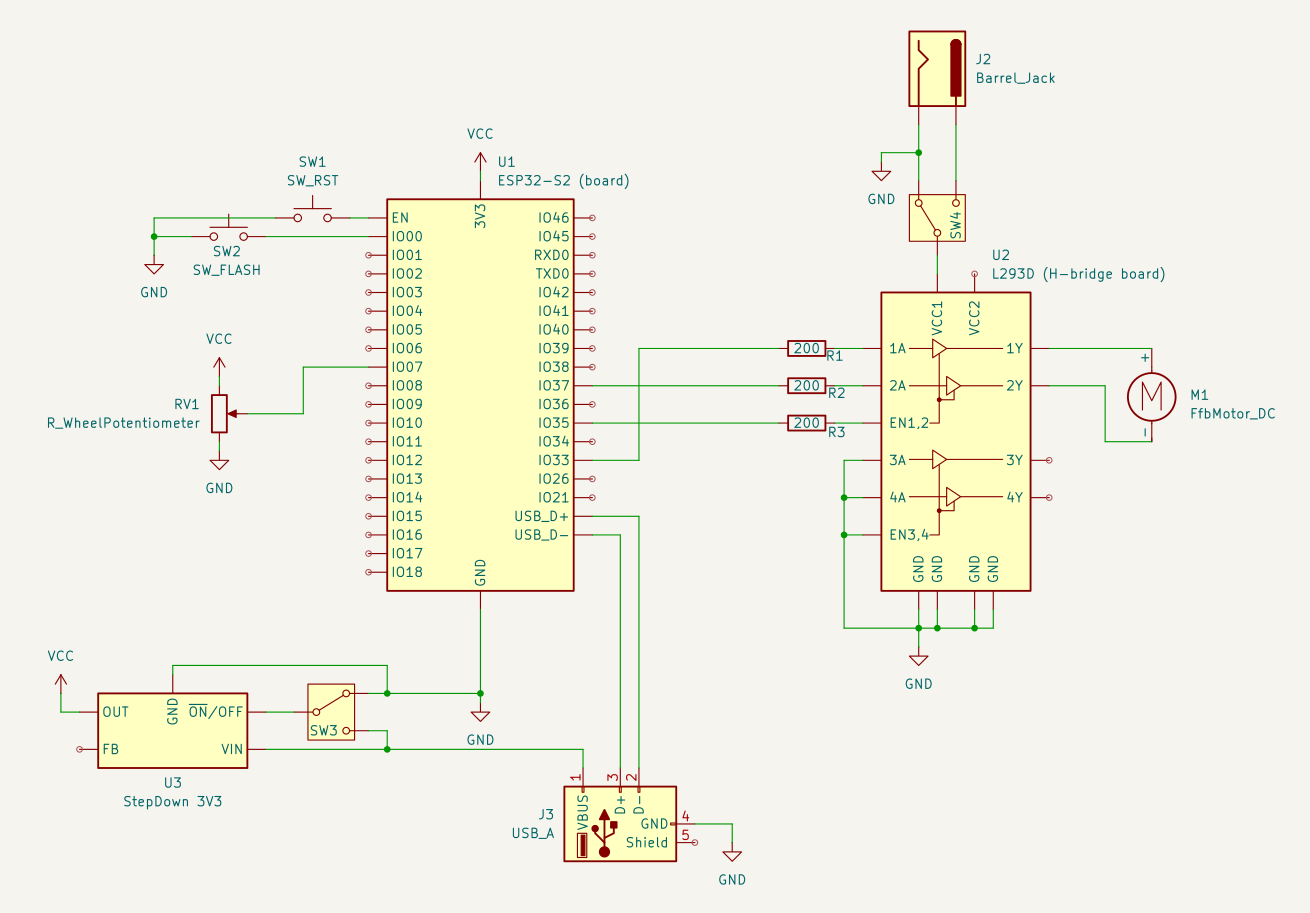
A basic USB steering wheel controller with force feedback for ESP32-S2, emulates G27 wheel. Currently configured for a 10 turn linear potentiometer and a H-bridge for motor control. I might replace potentiometer with Hall effect encoder in the future, since potentiometer readings are quite noisy, with variance of about 800 for encoded 14bit wheel angle (in-game wheel vibrates a little; mitigated a bit using a Kalman filter). No buttons/pedals implemented yet, but it's on a TODO list (buttons and pedal axes already mapped to HID report data bits in my notes).
This project is a base for future work of creating a decent direct-drive wheel. I wanted to learn as much as I can in the process, so I decided to make things from ground up. I also have a regular Logitech G29 wheel, which I might want to mod some time in the future. I might even replace the whole board inside with my stuff to have control over the wheel behavior. I know there already are projects like OpenFFBoard, but I guess I just like to reinvent the wheel from time to time.
If communication errors occur, try disabling USBCDC serial logging. Developed on Linux, works with new-lg4ff driver. Tested mostly in BeamNG.drive. Not tested on Windows/Mac or basic Linux driver.