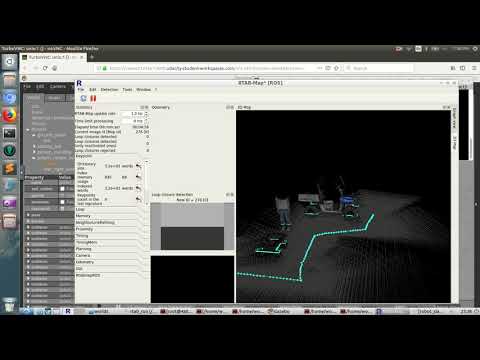
Real-Time Appearance-Based Mapping (RTAB-Map) is a SLAM algorithm supporting Lidar and RGB-D Graph SLAM. RTAB-Map can be used within a ROS stack to map and localize a mobile robot, handheld Kinect, or lidar device by iteratively detecting loop closures through a hypothesis evaluation and acceptance process. To evaluate RTAB-Map's performance several mapped worlds were navigated by a teleop controlled mobile robot with their output 2D and 3D maps compared with the known Gazebo worlds for accuracy.

Mapping Mars Rover Gazebo World in ROS with RTAB-Map posted on YouTube here: