Universal Robots has become a dominant supplier of lightweight, robotic manipulators for industry, as well as for scientific research and education.

This is one of the very first ROS2 manipulator drivers. Some of the new features are enabled by ROS2 and include decreased latency, improved security, and more flexibility regarding middleware configuration. The package contains launch files to quickly get started using the driver as a standalone version or in combination with MoveIt2
This driver is developed on top of Universal_Robots_Client_Library and support some key cobot functionalities like; pause at emergency stop, safeguard stop, automatic speed scaling to avoid violate the safety setting and manually speed scaling from the teach pendant. In addition the externalControl URCap makes it possible to include ROS2 behaviors in the robot program.
The driver is compatible across the entire line of UR robots -- from 3 kg payload to 16 kg payload and includes both the CB3 and the E-series.
Check also presentations and videos about this driver.
| ROS2 Distro | Foxy | Galactic | Humble | Rolling |
|---|---|---|---|---|
| Branch | foxy | galactic | humble | main |
| Build Status |
|
|
|
|
NOTE: There are two build stages checking current and future compatibility of the driver.
-
Binary builds - against released packages (main and testing) in ROS distributions. Shows that direct local build is possible.
Uses repos file:
src/Universal_Robots_ROS2_Driver/Universal_Robots_ROS2_Driver-not-released.<ros-distro>.repos -
Semi-binary builds - against released core ROS packages (main and testing), but the immediate dependencies are pulled from source. Shows that local build with dependencies is possible and if fails there we can expect that after the next package sync we will not be able to build.
Uses repos file:
src/Universal_Robots_ROS2_Driver/Universal_Robots_ROS2_Driver.repos
Each of these stages also performs integration tests using ursim. In order to execute these tests locally, they have to be enabled:
colcon build --packages-select ur_robot_driver --cmake-args -DUR_ROBOT_DRIVER_BUILD_INTEGRATION_TESTS=On
ur- Meta-package that provides a single point of installation for the released packages.ur_bringup- launch file and run-time configurations, e.g. controllers (DEPRECATED).ur_calibration- tool for extracting calibration information from a real robot.ur_controllers- implementations of controllers specific for UR robots.ur_dashboard_msgs- package defining messages used by dashboard node.ur_moveit_config- example MoveIt configuration for UR robots.ur_robot_driver- driver / hardware interface for communication with UR robots.
Deprecation: The ur_bringup package is deprecated and will be removed from Iron Irwini on.
For getting started, you'll basically need three steps:
-
Install the driver (see below). You can either install this driver from binary packages or build it from source. We recommend a binary package installation unless you want to join development and submit changes.
-
Start & Setup the robot. Once you've installed the driver, setup the robot
Please do this step carefully and extract the calibration as explained here. Otherwise the TCP's pose will not be correct inside the ROS ecosystem.
If no real robot is required, you can use a simulated robot that will behave almost exactly like the real robot.
- Start the driver. See the usage documentation for details.
- Install ROS2. This branch supports only ROS2 Humble. For other ROS2 versions, please see the respective branches.
- Install the driver using
sudo apt-get install ros-${ROS_DISTRO}-ur-robot-driver
Before building from source please make sure that you actually need to do that. Building from source might require some special treatment, especially when it comes to dependency management. Dependencies might change from time to time. Upstream packages (such as the library) might change their features / API which require changes in this repo. Therefore, this repo's source builds might require upstream repositories to be present in a certain version as otherwise builds might fail. Starting from scratch following exactly the steps below should always work, but simply pulling and building might fail occasionally.
-
Install ROS2. branch supports only ROS2 Humble. For other ROS2 versions, please see the respective branches.
Once installed, please make sure to actually source ROS2 before proceeding.
-
Make sure that
colcon, its extensions andvcsare installed:sudo apt install python3-colcon-common-extensions python3-vcstool -
Create a new ROS2 workspace:
export COLCON_WS=~/workspace/ros_ur_driver mkdir -p $COLCON_WS/src -
Clone relevant packages, install dependencies, compile, and source the workspace by using:
cd $COLCON_WS git clone -b humble https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver.git src/Universal_Robots_ROS2_Driver vcs import src --skip-existing --input src/Universal_Robots_ROS2_Driver/Universal_Robots_ROS2_Driver-not-released.${ROS_DISTRO}.repos rosdep update rosdep install --ignore-src --from-paths src -y colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release source install/setup.bash -
When consecutive pulls leads to build errors, please make sure to update the upstream packages before filing an issue:
cd $COLCON_WS vcs import src --skip-existing --input src/Universal_Robots_ROS2_Driver/Universal_Robots_ROS2_Driver-not-released.${ROS_DISTRO}.repos rosdep update rosdep install --ignore-src --from-paths src -y
MoveIt! support is built-in into this driver already. Watch MoveIt in action with the Universal Robots ROS2 driver:
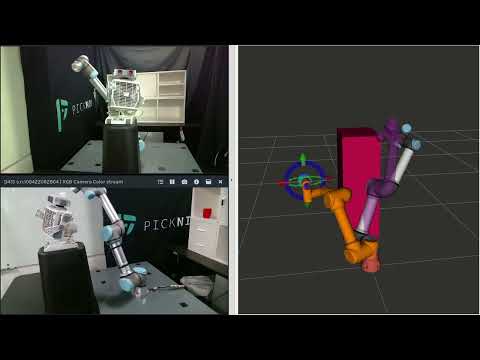
The video shows free-space trajectory planning around a modeled collision scene object using the MoveIt2 MotionPlanning widget for Rviz2.
See the MoveIt! section of the Usage guide for details.
- Trajectory control currently only supports position commands. In the future, velocity control will be added.
Code is auto-formatted with clang-format 14 whenever a git commit is made. Please ensure these dependencies are installed:
pip3 install pre-commit
sudo apt install clang-format-14
Prepare the pre-commit formatting to run like this:
pre-commit install