Project Name: Convolutional Neural Networks for Human Pose Estimation
Author: David Pascual Hernández [[email protected]]
Academic Year: 2017/2018
Degree: Computer Vision Master (URJC)
Mediawiki: http://jderobot.org/Dpascual-tfm
Tags: Deep Learning, Tensorflow, Convolutional Pose Machines, Human Pose Estimation
State: Developing
Convolutional Pose Machines (CPMs) are multi-stage convolutional neural networks for estimating articulated poses, like human pose estimation. In this repo, a tool for live testing CPMs is provided. We currently host two implementations based on different frameworks:
- Caffe implementation (official repo).
- TensorFlow implementation.
- JdeRobot (installation guide)
- TensorFlow (installation guide)
- Caffe (recommended installation guide)
Other dependencies like Numpy, PyQT or OpenCV should be automatically installed along with the previous ones. By the way, if you install TensorFlow and/or Caffe with GPU support, the code provided in this repo will take advantage of it to get closer to real-time estimation (we're almost there).
In order to test CPMs with live video feed, we have built humanpose component within the framework of
JdeRobot, a middleware that provides several tools and drivers for robotics and computer vision tasks.
Once all the dependencies have been installed and the repo has been cloned, download the trained Caffe and TensorFlow models (provided by their authors):
chmod +x get_models.sh ./get_models.sh
You can choose different video sources to feed the CPM (ROS, JdeRobot, local webcam, video file). The video source, as
well as other settings can be modified from the humanpose.yml file. When you have set your desired
parameters, from another terminal run:
python humanpose.py humanpose.yml
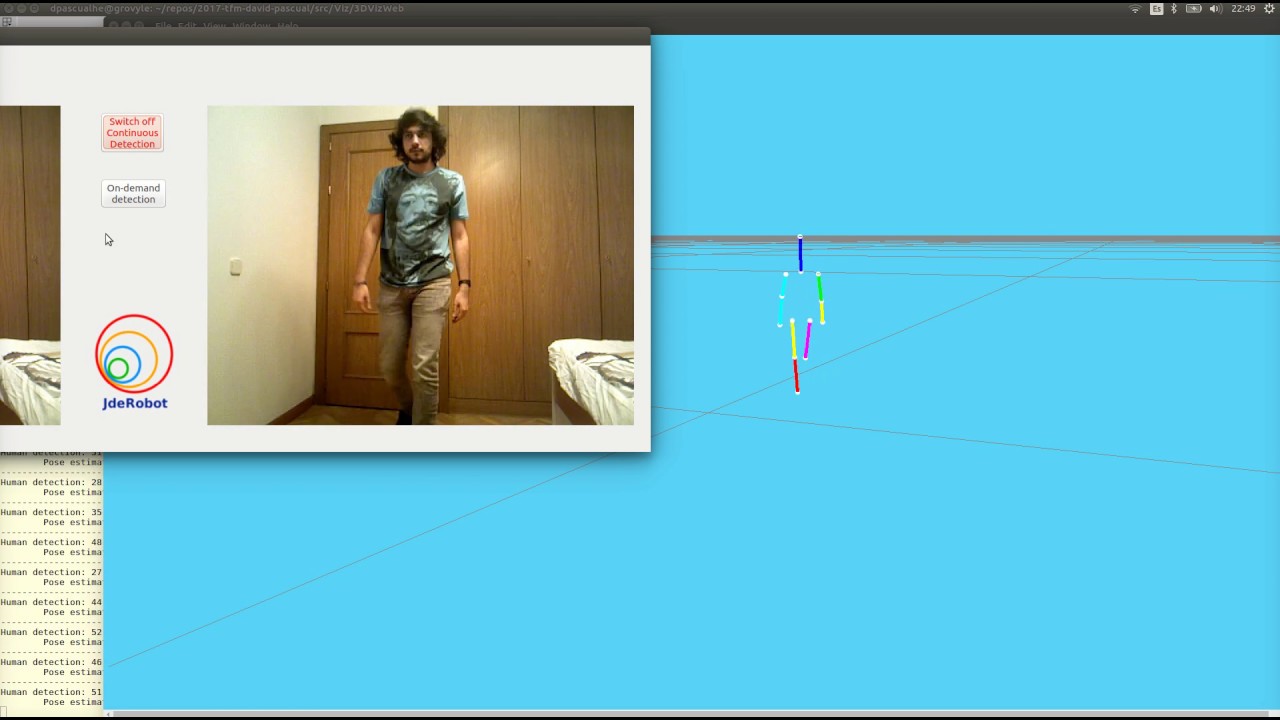
This will launch a GUI where live video and estimated poses are shown.
RGBD camera can be used in order to get the pose 3D coordinates. 3DVizWeb, developed within JdeRobot, allow us to project the estimated joints and limbs in 3D. If you want to use this feature, you must follow the instructions available here and run:
cd Viz/3DVizWeb/ npm start
right after launching humanpose.
Click in the image below to watch a real-time demo:
The input data for this demo is available as a rosbag file, containing the registered depth map and color images.
More info: http://jderobot.org/Dpascual-tfm