{kind=link}
C++ Project with modern features to visualize path finding between two points on real map using A* search algorithm and IO2D visualization library.
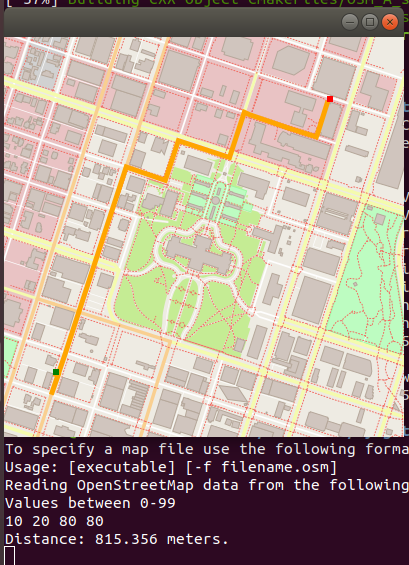
The distance between the two points is printed out in the console in meters afterwards
These instructions will get you a copy of the project up and running on your local machine for development and testing purposes. See deployment for notes on how to deploy the project on a live system.
1. Make & CMake
2. gcc/g++
3. Installing following library
-IO2D
- Install IO2D
Follow from the github: https://github.com/cpp-io2d/P0267_RefImpl/blob/master/BUILDING.md
Section:Cairo/Xlib on Linux
1- Refresh apt: sudo apt update
2- Install GCC: sudo apt install build-essential
Don't install cmake from apt cmd
https://github.com/Kitware/CMake/releases/tag/v3.13.4, download the source code and extract it.
Run command from : https://gitlab.kitware.com/cmake/cmake
$ ./bootstrap && make && sudo make install
=>open new terminal to get new cmake config, then keep doing the following cmds
Keep finish the IO2D presetting.
Install Cairo: sudo apt install libcairo2-dev
Install graphicsmagick: sudo apt install libgraphicsmagick1-dev
Install libpng: sudo apt install libpng-dev
Use Cmake to build IO2D.
git clone --recurse-submodules https://github.com/cpp-io2d/P0267_RefImpl
cd P0267_RefImpl
mkdir Debug
cd Debug
cmake --config Debug "-DCMAKE_BUILD_TYPE=Debug" ..
cmake --build .
make
sudo make install
- Build ND project
git clone https://github.com/Mostafa-ashraf19/CPP-Route-Planning.git
mkdir build && cd build
cmake ..
make
- Run it
./test
./OSM_A_star_search
./test make testing for project
./OSM_A_star_search run window for inputs then display out put
- Soon
- Soon