{kind=link}
![]()

rebop is a fast stochastic simulator for well-mixed chemical reaction networks.
Performance and ergonomics are taken very seriously. For this reason, two independent APIs are provided to describe and simulate reaction networks:
- a macro-based DSL implemented by [
define_system], usually the most efficient, but that requires to compile a rust program; - a function-based API implemented by the module [
gillespie], also available through Python bindings. This one does not require a rust compilation and allows the system to be defined at run time. It is typically 2 or 3 times slower than the macro DSL, but still faster than all other software tried.
It currently only supports reaction rates defined by the law of mass action. The following macro defines a dimerization reaction network naturally:
use rebop::define_system;
define_system! {
r_tx r_tl r_dim r_decay_mRNA r_decay_prot;
Dimers { gene, mRNA, protein, dimer }
transcription : gene => gene + mRNA @ r_tx
translation : mRNA => mRNA + protein @ r_tl
dimerization : 2 protein => dimer @ r_dim
decay_mRNA : mRNA => @ r_decay_mRNA
decay_protein : protein => @ r_decay_prot
}To simulate the system, put this definition in a rust code file and instantiate the problem, set the parameters, the initial values, and launch the simulation:
let mut problem = Dimers::new();
problem.r_tx = 25.0;
problem.r_tl = 1000.0;
problem.r_dim = 0.001;
problem.r_decay_mRNA = 0.1;
problem.r_decay_prot = 1.0;
problem.gene = 1;
problem.advance_until(1.0);
println!("t = {}: dimer = {}", problem.t, problem.dimer);Or for the classic SIR example:
use rebop::define_system;
define_system! {
r_inf r_heal;
SIR { S, I, R }
infection : S + I => 2 I @ r_inf
healing : I => R @ r_heal
}
fn main() {
let mut problem = SIR::new();
problem.r_inf = 1e-4;
problem.r_heal = 0.01;
problem.S = 999;
problem.I = 1;
println!("time,S,I,R");
for t in 0..250 {
problem.advance_until(t as f64);
println!("{},{},{},{}", problem.t, problem.S, problem.I, problem.R);
}
}which can produce an output similar to this one:
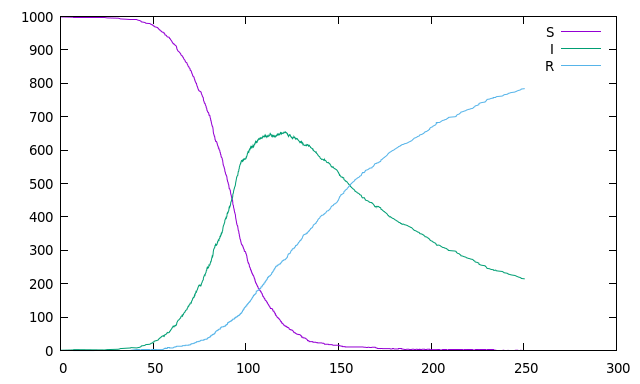
This API shines through the Python bindings which allow one to define a model easily:
import rebop
sir = rebop.Gillespie()
sir.add_reaction(1e-4, ['S', 'I'], ['I', 'I'])
sir.add_reaction(0.01, ['I'], ['R'])
print(sir)
ds = sir.run({'S': 999, 'I': 1}, tmax=250, nb_steps=250)You can test this code by installing rebop from PyPI with
pip install rebop. To build the Python bindings from source,
the simplest is to clone this git repository and use maturin develop.
The function-based API underlying the Python package is also available from Rust, if you want to be able to define models at run time (instead of at compilation time with the macro DSL demonstrated above). The SIR model is defined as:
use rebop::gillespie::{Gillespie, Rate};
let mut sir = Gillespie::new([999, 1, 0]);
// [ S, I, R]
// S + I => 2 I with rate 1e-4
sir.add_reaction(Rate::lma(1e-4, [1, 1, 0]), [-1, 1, 0]);
// I => R with rate 0.01
sir.add_reaction(Rate::lma(0.01, [0, 1, 0]), [0, -1, 1]);
println!("time,S,I,R");
for t in 0..250 {
sir.advance_until(t as f64);
println!("{},{},{},{}", sir.get_time(), sir.get_species(0), sir.get_species(1), sir.get_species(2));
}Performance is taken very seriously, and as a result, rebop outperforms every other package and programming language that we tried.
Disclaimer: Most of this software currently contains much more
features than rebop (e.g. spatial models, custom reaction rates,
etc.). Some of these features might have required them to make
compromises on speed. Moreover, as much as we tried to keep the
comparison fair, some return too much or too little data, or write
them on disk. The baseline that we tried to approach for all these
programs is the following: the model was just modified, we want
to simulate it N times and print regularly spaced measurement
points. This means that we always include initialization or
(re-)compilation time if applicable. We think that it is the most
typical use-case of a researcher who works on the model. This
benchmark methods allows to record both the initialization time
(y-intercept) and the simulation time per simulation (slope).
Many small benchmarks on toy examples are tracked to guide the
development. To compare the performance with other software,
we used a real-world model of low-medium size (9 species and 16
reactions): the Vilar oscillator (Mechanisms of noise-resistance
in genetic oscillators, Vilar et al., PNAS 2002). Here, we
simulate this model from t=0 to t=200, reporting the state at
time intervals of 1 time unit.

We can see that rebop's macro DSL is the fastest of all, both in time per simulation, and with compilation time included. The second fastest is rebop's traditional API invoked by convenience through the Python bindings.
- compartment volumes
- arbitrary reaction rates
- other SSA algorithms
- tau-leaping
- adaptive tau-leaping
- hybrid models (continuous and discrete)
- SBML
- CLI interface
- parameter estimation
- local sensitivity analysis
- parallelization
- events
- space (reaction-diffusion systems)
- rule modelling
- DSMTS
- purely decoupled exponentials
- ring
- Toggle switch
- LacZ, LacY/LacZ (from STOCKS)
- Lotka Volterra, Michaelis--Menten, Network (from StochSim)
- G protein (from SimBiology)
- Brusselator / Oregonator (from Cellware)
- GAL, repressilator (from Dizzy)
- GillesPy2
- STEPS
- SimBiology
- Copasi
- BioNetGen
- VCell
- Smoldyn
- KaSim
- StochPy
- BioSimulator.jl
- DiffEqJump.jl
- Gillespie.jl
- GillespieSSA2
- Cayenne
- Dizzy
- Cellware
- STOCKS
- StochSim
- Systems biology toolbox
- StochKit (successor: GillesPy2)
- SmartCell
- NFsim
License: MIT