

- Requires only 1 digital input on an AVR.
- It doesn't require any additional capacitor/resistor, no external components.
- Hand-crafted assembly sampler is very optimized.
- It should be faster than the 2-pin or ADC method. Capable to capture up to 4080 samples with performance of 1.3 clock per sample!
- Allows being tweaked from the constructors and from the defines as well.
- If small enough samples iterations are used, then on compile-time it will be auto-detected and the some return types and internal variables can shrink from uint32_t to uint16_t (making footprint smaller)
- Because v2.0 has much higher sampling speed, it can recognize the pressure much more precisely.
- Bundled in calibration (which will remove 'DC' offset from the measurements)
- Bundled debounced methods
- Because using internal pull-up (and there is no pull-down) the sensing is done only on the 'charging' cycle and can't be tested again on the 'discharging' cycle. No discharge measurement means some accuracy is lost and this system is more sensitive to noise and environment changes. This pull-up resistance is not specified (around 20k-100k) and could be different between devices.
- No way to increase the resistance and no way increase the sensitivity, only touch can be detected, no proximity sensor
- Depends on the clock speed, tested on 16MHz, but should work at much lower clocks as now the sampling is very fast.
- Because the C++ templates are used the code size will increase when more sensors are created.
- Will not work on non-AVR Arduinos (if needed I could make ports).
- Will not work well on IRQ heavy applications. To remedy the sensing can block IRQs:
#define SINGLE_PIN_CAPACITIVE_SENSE_BLOCK_IRQ 1
| Board | Build on the CI | Tested on real HW |
|---|---|---|
| Arduino Duemilanova - ATmega328 - 16MHz | PASS | PASS |
| Arduino Uno | PASS | Do not have HW to test |
| Arduino Nano - ATmega328 - 16MHz | PASS | PASS |
| Arduino Mega 2560 | PASS | Do not have HW to test |
| Arduino Mega ADK - 16MHz | PASS | PASS |
Note: To see the CI build logs, visit the Travis-CI website.
The following defines can be configured before including the SinglePinCapacitiveSense.h
To specify what type will be used for the total sum variables and return types.If left undefined then it will be auto-detected with taking SINGLE_PIN_CAPACITIVE_SENSE_DEFAULT_SAMPLING and SINGLE_PIN_CAPACITIVE_SENSE_TIMEOUT into consideration:
#define SPC_VAL uint32_t
To block all IRQs while sampling:
#define SINGLE_PIN_CAPACITIVE_SENSE_BLOCK_IRQ 1
How many times the sensor will be sampled (when constructor arguments are left to default), this value is used to calculate if the total sum value will fit into a uint16_t type or uint32_t has to be used. Therefore if sampling in a constructor is used with much higher value, then either specify SPC_VAL by hand or updatethis sampling define so then the SPC_VAL will be detected correctly:
#define SINGLE_PIN_CAPACITIVE_SENSE_DEFAULT_SAMPLING 16
To change how many sets of the 16 micro samples have to be taken before the capacitance considered too high and sampling aborted as an error (non-touched result). Has to be lower than 256 and it shouldn't be too low because even untouched pin might take some time to get passed by the sampler:
#define SINGLE_PIN_CAPACITIVE_SENSE_TIMEOUT 255
When calibrating the inputs to detect what is the lowest noise level, how many of these have to be returned in the row to consider the global minimum and not some intermittent temporary local minimum/noise. This will make the first X iteration of the touch sensing ineffective as the sensor will be calibrating itself:
#define SINGLE_PIN_CAPACITIVE_SENSE_STREAK_COUNT 8
To change the default deboucing counter when no argument IsPressedDebounced(); is used, however for custom non-global changes there is IsPressedDebounced(uint8_t count); as well:
#define SINGLE_PIN_CAPACITIVE_SENSE_DEBOUNCE_COUNT 10
Typically the capacitive sensing forms a small capacitor between the sensor and the finger, charging (and discharging) it while measuring the time (or voltage) can estimate the capacitance and from that figure out that a press has happened. Because area and distance can affect capacitance, therefore pressing harder on the surface can increase the capacity and the strength can be detected as well. Microchip's Atmel Qtouch has dedicated HW pins and has good accuracy and sensitivity, but this HW feature is not present everywhere. There is SW QTouch support with as well, but for limited targets. And then there are Arduino libraries implementing this in software, either depending on ADC pin, or 2-pins with an external resistor. This library takes the 2-pin approach, but instead of using separate sending pin with a large resistor, the pin is setup to INPUT and an internal pull-up resistor is enabled. See the unmarked resistor on the left side of the pin's diagram:

This resistor is around 20k-100k and is a magnitude smaller than it would be ideal and the charge up process happens much faster than typically, therefore the code needs to be sampling very quickly. See charge up characteristics when nothing is touched:
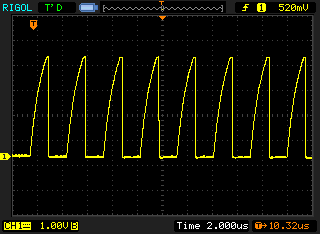
When the sensor is touched the capacitance increases and charge-up slows down, but not as radically as it would be desired and this still requires fast sampling, see figure below:

The fact that with TTL 5V the input can be considered HIGH already at 2V is making this even more time-critical. On the figures above the voltage can get over 2V because the sampling is not as fast and can charged up beyond the 2V before it was tested and pulled down (Note that release 2.0 and above is much faster). Another problem is that the pull-up resistor is not exactly specified and can be different between the devices (20k - 100k). Values which work for me might not work for others and therefore it was important to include self-calibration. Overall this method is not as robust/portable as the previously mentioned approaches, but if somebody can tune it for their device/environment/conditions, then it should be fine for hobby projects. However, this shouldn't be used for any critical input on a system that needs to be dependable.
Because the code can't be generic, the PORT address and pin have to be hardcoded. If port and pin are generic, they are treated as any value, and 16bit addressing is used (using a pair of 8bit registers, X/Y/Z), pin mask can be generated and stored, but negation has to be evaluated (and stored) as well (just to be able to set/clear/test the bits). Because these can change on runtime the compiler might struggle to optimize this further and will involve many clocks wasted moving data around (into the registers) when they could have been as immediate values.
With hard-coded approach the compiler can see few things:
-
The pin/mask is actually one-hot schema and this can be detected by the compiler, instead of testing value with the immediate AND (ANDI) it can be tested directly by a bit set/clear test as the AVR has instructions to test specific bits. Revision 2.0 switched to BIT_PIN position schema instead and is not even using the mask at all. At few places where a mask is needed it is used with 1 << BIT_PIN, which actually compiler will optimize, calculate bit position from it and use bit tests instructions instead of a mask.
-
The PORT pointer is not regular 16-bit pointer, for lower address regions there are instructions with I/O direct addressing, for 6-bit addresses (0x20 - 0x5F) there is input (IN) instruction where the address is part of the OP-code and there is no need to use the 16-bit register pairs, it loads the content into a register and with ANDI mask can be tested for the bit. However, for the even lower 5-bit region (0x20 - 0x3F) there are instructions (SBIC/SBIS) that can test for a specific bit is set/clear without even loading the content into a register or needing to invoke ANDI. Not just this combines two steps into one, but both address and bit location are direct and are immediate part of the OP-code, so no need to load registers with the address and bit position.
-
Because the compiler knows in advance that the desired port is in the I/O 5-bit region and that the mask is one-hot, it can effectively utilize the SBIC / SBIS instructions to test specific bit position and drastically speed up the runtime execution, which so essential for this approach to work. And wouldn't be possible if the code would have to be runtime generic and work with any mask and any pointer. It's cleaner as well, everything needed is contained in the instruction's opcodes and doesn't require any other registers to be populated. Now 15 samples are taken with IN instruction into registers as a buffer and the 16th with SBIS. If it fails then the previously taken 15 samples are analyzed (to find exactly where, but then the speed doesn't matter anymore). If it passes it will loop again to take another 15 samples into the same registers (nothing interesting happended so we could disregard the whole previous content of the buffer). Overflow counter checking is done between the IN samples (~1 extra instruction between 4 sampling instructions), this way the jitter between sampling and not-sampling is more evently spread over.
Note: The 'constexpr' workaround is not ideal, see the discussion here: https://www.avrfreaks.net/comment/2847256#comment-2847256, for example when using mega328 the iom328p.h will be included which will define the port:
#define PORTD _SFR_IO8(0x0B)
Together with sfr_defs.h:
#define _SFR_IO8(io_addr) _MMIO_BYTE((io_addr) + __SFR_OFFSET)
#define _MMIO_BYTE(mem_addr) (*(volatile uint8_t *)(mem_addr))
The port might end up being defined as (*(volatile uint8_t *)( 0x0B + 0x20)) which might be tricky to correctly convert back to the pure offset literal which can be feed as template's non-type parameter. I will try to experiment a bit with few things and if better solution will be made I will update this project.
https://en.wikipedia.org/wiki/Capacitive_sensing
https://www.arduino.cc/en/Reference/PortManipulation
http://ww1.microchip.com/downloads/en/devicedoc/atmel-0856-avr-instruction-set-manual.pdf
https://grobotronics.com/images/companies/1/datasheets/arduino-mega-pinout-diagram.jpg
{kind=link}
https://www.microchip.com/webdoc/AVRLibcReferenceManual/inline_asm_1gcc_asm.html
https://www.microchip.com/webdoc/AVRLibcReferenceManual/inline_asm_1io_ops.html
http://www.ethernut.de/en/documents/arm-inline-asm.html
https://stackoverflow.com/questions/3898435