没学过计算机图形学、图像处理课程的菜鸡最近在总结线性代数、突然脑子一热代码上头了 、线代的魅力太精彩了。
如果能够理解下面的大致过程一定会会对线性变换、基变换、以及可能我们听说过的图像坐标系、世界坐标系、摄像机坐标系。
这不仅仅在某个方向涉及这些,例如机器人视觉定位SLAM以及3D动画、游戏开发都会与这些密切相关,以前我也接触过RoboMaster的机器人视觉开发、做过图像处理,
但这是我的一个尝试,如果你有兴趣的话可以尝试一下,我想会非常有趣,这里并没有选择专业的渲染工具,如OpenGL、以及图像处理的OpenCV,我想用一个简单的例子理解较多的知识是最重要的。
在此我们使用EasyX与Eigen3 ,有人说为什么不去学OpenGL、我只能说术业有专攻我从没接触过他,我用简单的实现原理来帮助我理解线性代数、而非为了渲染效率工程专业性上考虑。
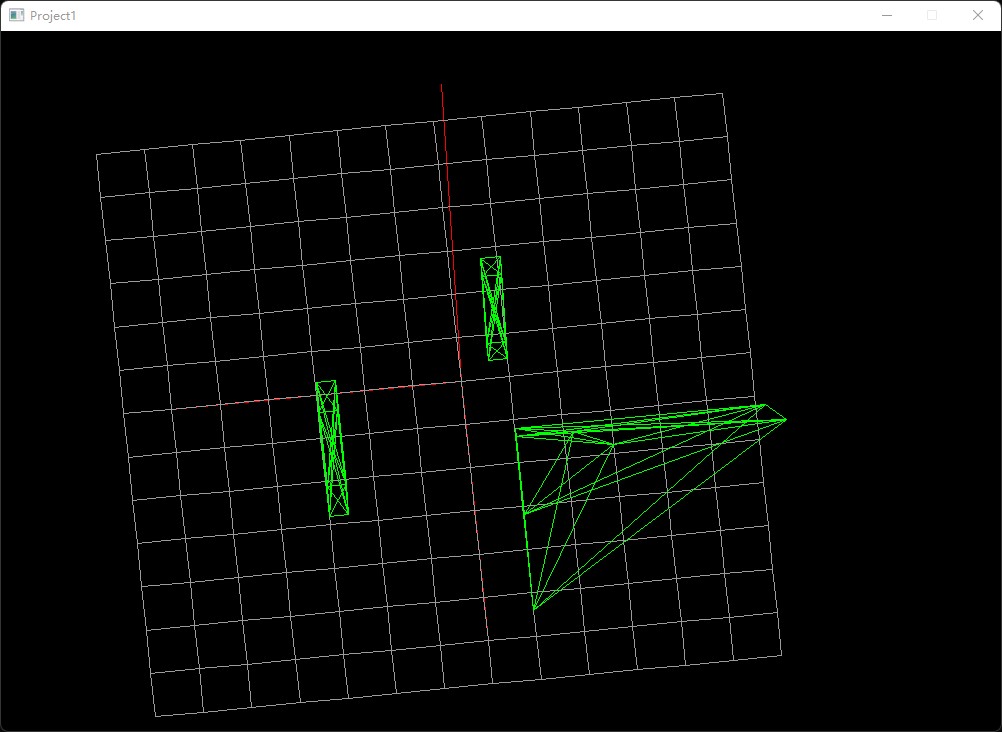
1、相机坐标系的旋转
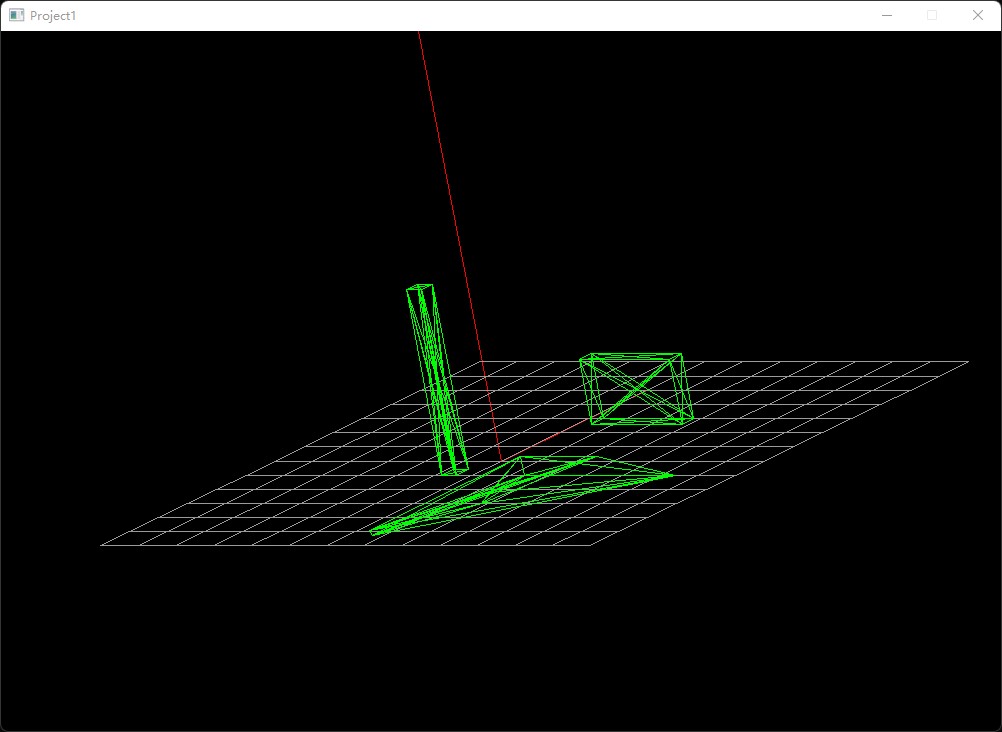
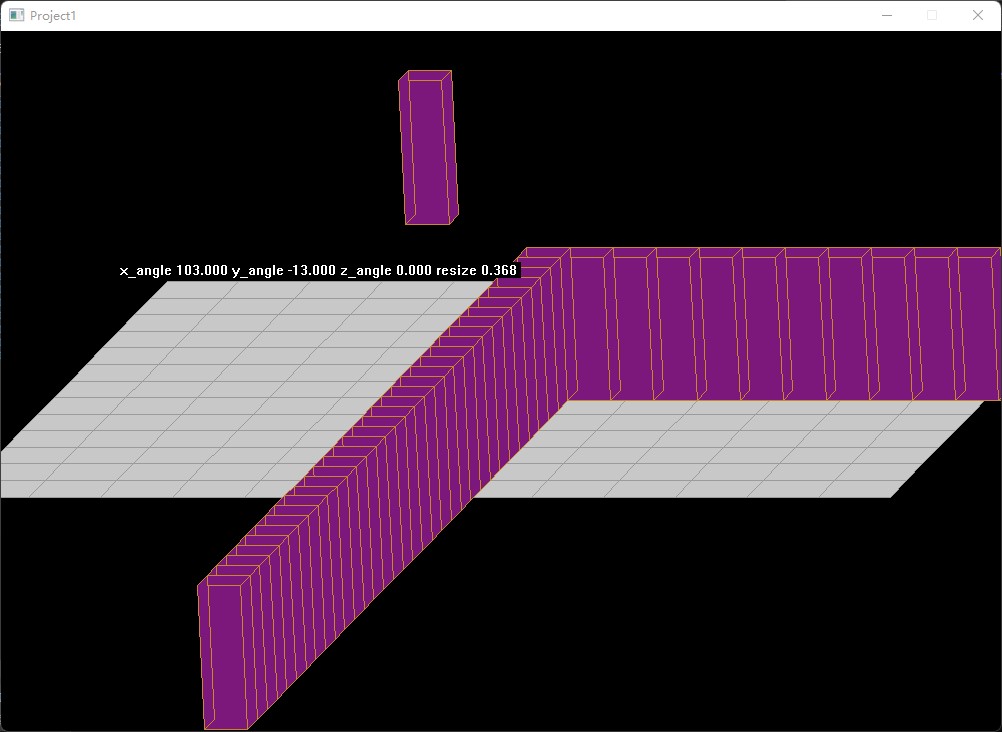
2、自定义填充模型
3、使用 Q A W S E D 平移
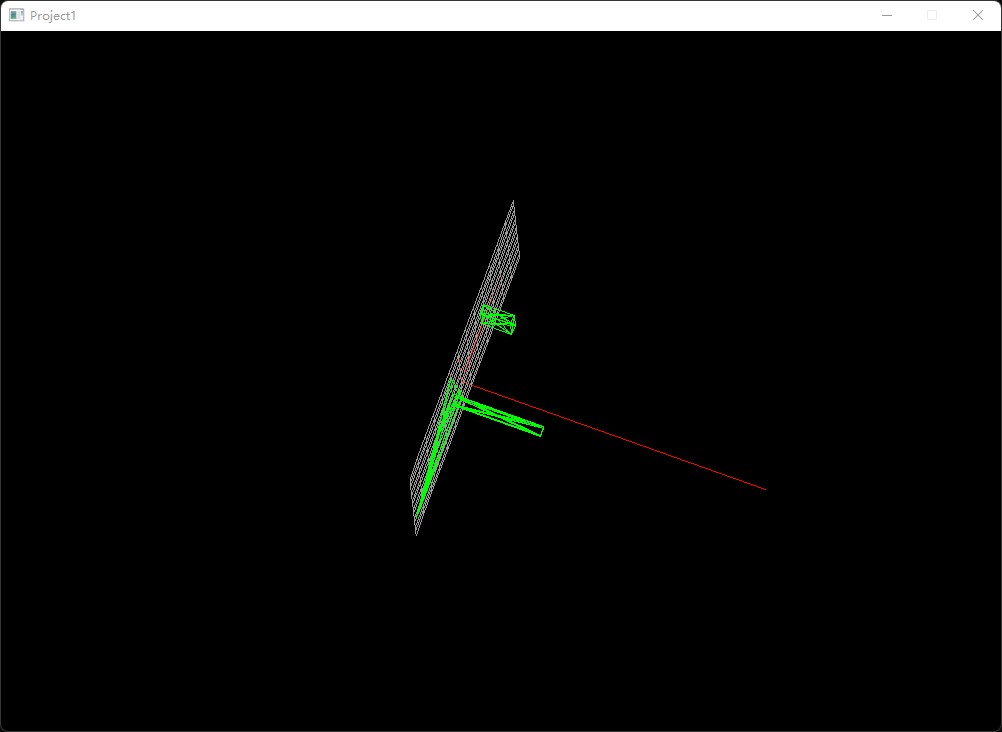
4、使用 R F T G Y H 旋转
git clone https://hub.fastgit.xyz/gaowanlu/3dll.git或在Github https://github/gaowanlu/3dll、获取最新的工程效果
请使用Visual Studio 2022 打开项目 ,或者自己使用其他IDE进行构建
环境搭建打开sln文件
请使用Visual Studio 2022 打开项目 ,或者自己使用其他IDE进行构建
项目 =》属性 =》C/C++ =》常规添加本项目的include文件夹路径到附加包含目录属性
项目 =》属性 =》链接器 =》将本项目的lib/x64文件夹路径添加附加库目录
注意设置上面步骤时,尽量选择 配置:所有配置 平台:x64 Release、以免新手怎么弄都跑不起来
课程推荐
- Bilibili MIT线性代数课程 https://www.bilibili.com/video/BV1ix411f7Yp
- 线性代数的本质 https://www.bilibili.com/video/BV1ib411t7YR
我们有时我们觉得一切东西没有太大用途、那是我们的认知水平还不够、在学习的路上、书山有路勤为径、学海无涯苦作舟。